Mobile Manipulation Project
Summer '22 technical skills: Robotics, PID control, MATLAB
The project requires us to write a software to plan a trajectory for the end-effector of youBot (a 5R robot arm articulated on a four mecanum wheels mobile base) to move a cube from one to another specific location and implement a control system forcing the whole body to follow that trajectory.
In this project, you could design the relative configuration of the end-effector and the cube when grasping, planning the end-effectors' trajectory as you like, and adjust the controller parameter to get better performance. The project uses velocity control so no robot dynamics is involved.
The project was implemented on CoppeliaSim simulator. The main control path is written on MATLAB.
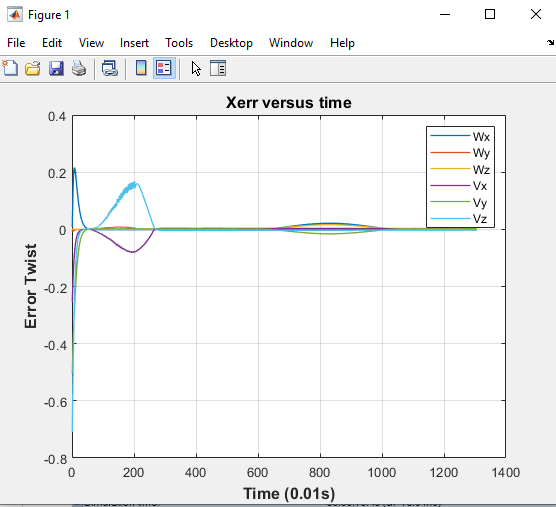
To get a balance between faster error twist convergence speed and less oscillation and smaller steady state error, adjusting the Kp,Ki of the feedback controller and obtain a relatively good performance of the robot(Error twist versus time shown below).